Hello, as the next version is about to be released, I’m providing the source code and schematic diagrams for the lower computer and handwheel here. If you know how to program, this might be useful to you. Of course, the source code and schematics for the lower computer will also be available in the next version. You can find me at http://www.grblhal.com.
Source code information: https://drive.google.com/file/d/15KcPXQIioti_rdN-VB-oW0bY76A9xThF/view?usp=sharing
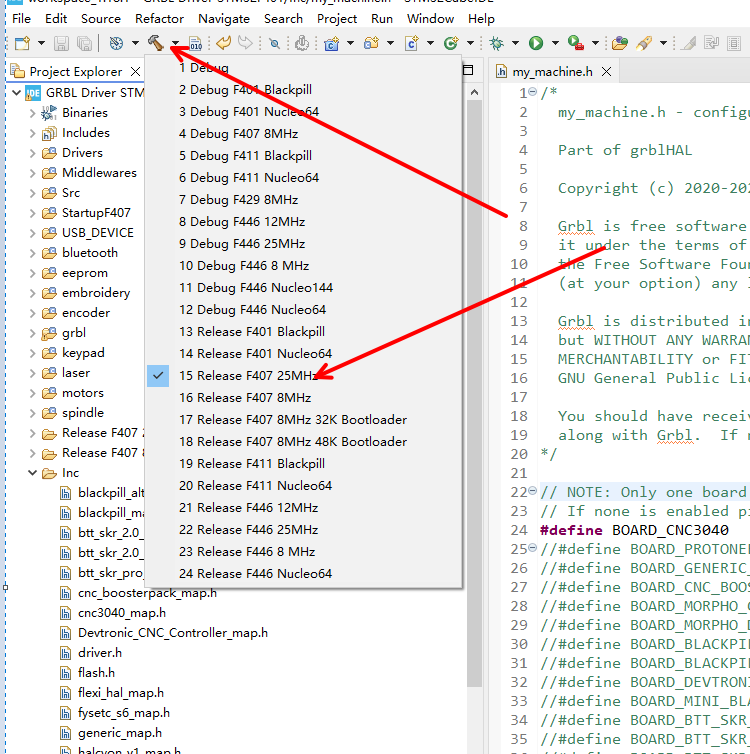
The lower computer uses the open-source grblHAL for motion control. To compile the source code, please go to the ST official website to download the latest STM32CubeIDE. Then, click on <File>, click <Open Projects from File System…>, and select the source code folder. Finally, click the small hammer icon and select stm32f407 25mhz to compile.
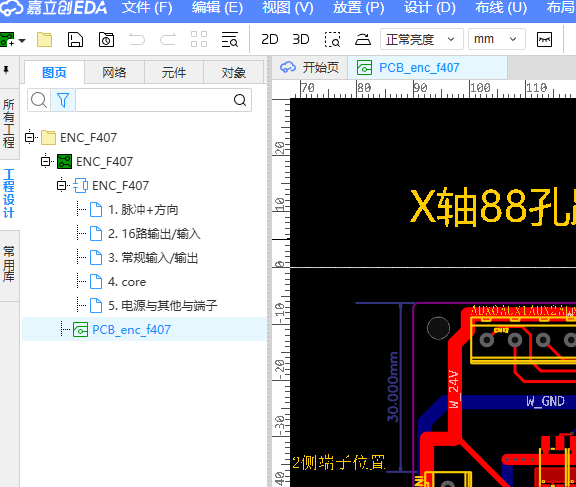
For the PCB and schematic diagrams of the lower computer and handwheel, you will need to download JLCEDA Pro to open them.
(To be honest, the PCB drawing quality is a bit terrible… but it works,)
In addition, a 3D-printable handwheel shell is also provided. The two shells do not require any support and it is recommended to use Tuozhu printing.
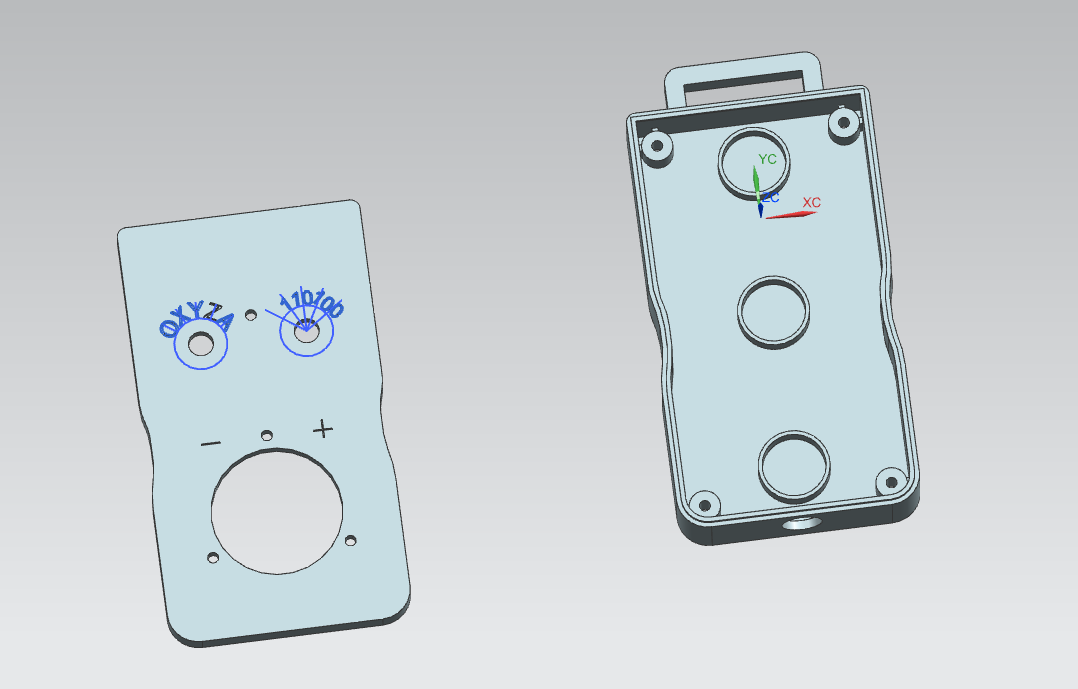
This is what the final product looks like. Although it is very strong using PETG or PETG-CF, I still think it cannot be sold as a commodity outside of China. The road is really far away.
